
|
|
Institute of Computer Science — Knowledge-Based Systems Research Group |
Globally Consistent 3D Mapping with Scan Matching |
We have successfully matched a set of 3D laser scans provided by RIEGL Laser Measurement Systems - Laser Scanner. This page presents the matching results and includes videos and animations.
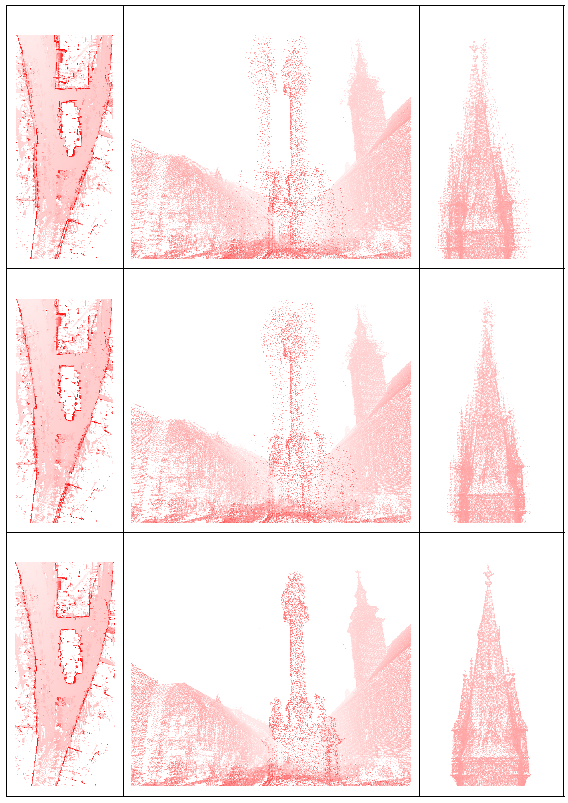
Figure: Map improvement during LUM. Main square in Horn
(Austria). Progress after 1 (top), 30 (middle), 200 (bottom)
iterations. Left: Top view, Middle: Monument in the center of the main
square, Right: Church spire. Data provided by courtesy of RIEGL LMS
GmbH.

Figure: Photos showing the scene presented in the previous
figure. Left: The right part of the middle detailed view. Right: The
white-steepled St. Georg church. Data provided by courtesy of RIEGL
LMS GmbH.
Dorit Borrmann, Jan Elseberg, Kai Lingemann, Andreas Nüchter and Joachim Hertzberg. Globally consistent 3D mapping with scan matching. Journal of Robotics and Autonomous Systems, Vol. 56, Issue 2, pages 130 - 142, February 2008, [ScienceDirect Link] [Get Paper] [Get Videos].