Johannes Schauer and Andreas Nüchter
johannes.schauer@uni-wuerzburg.de andreas.nuechter@uni-wuerzburg.de
Informatics VII: Robotics and Telematics, Julius-Maximilians-University, Am Hubland, Würzburg 97074, Germany
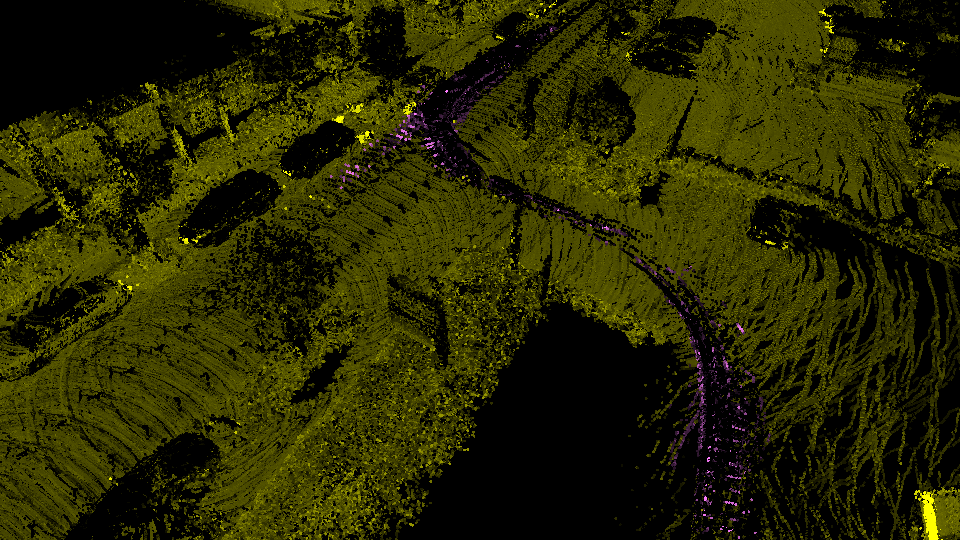
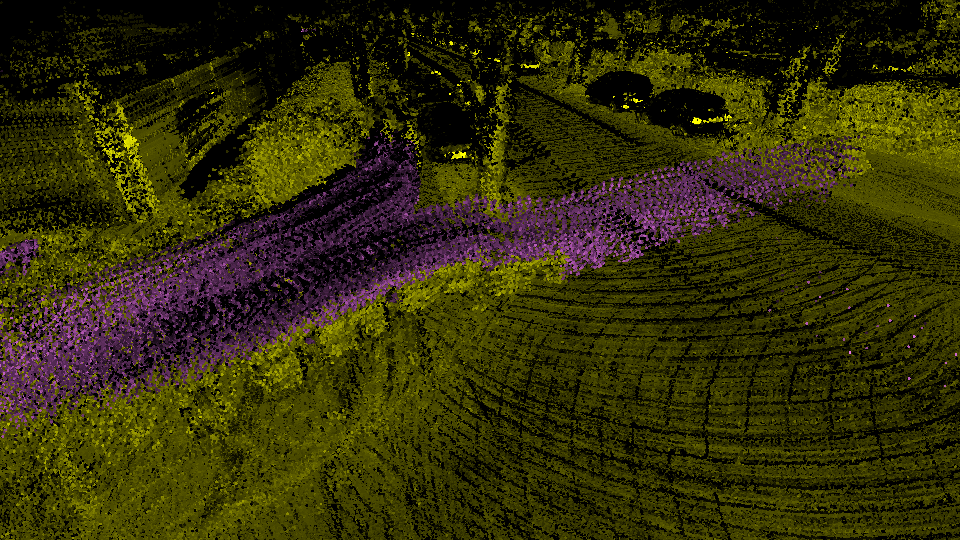
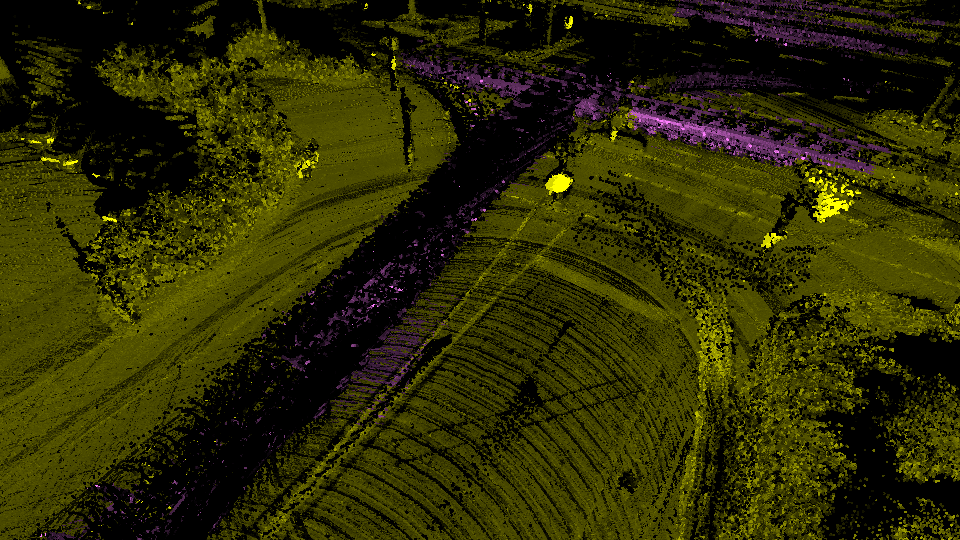
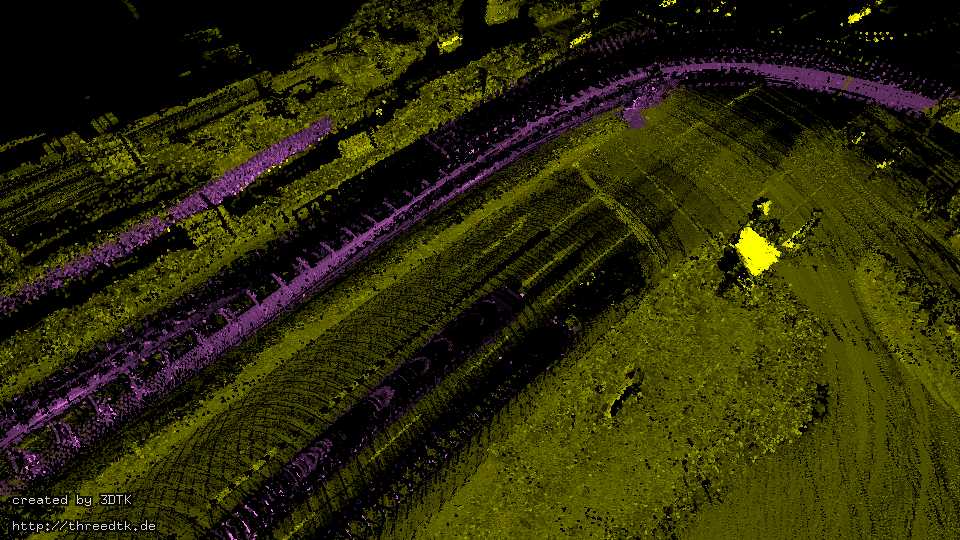
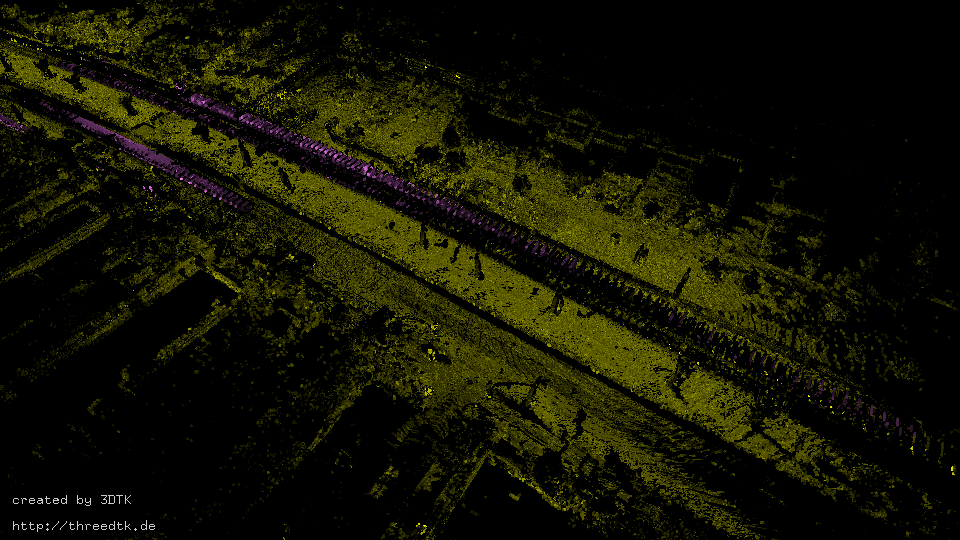
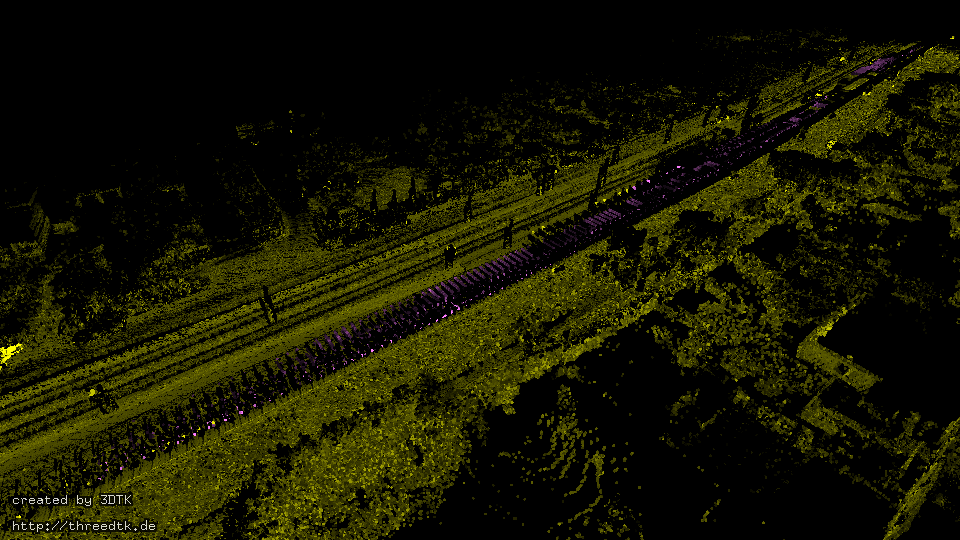
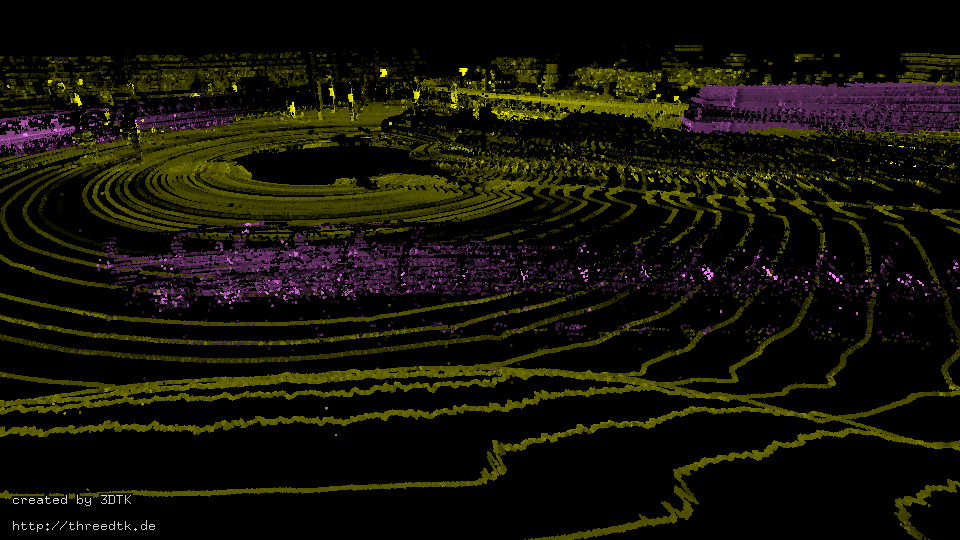
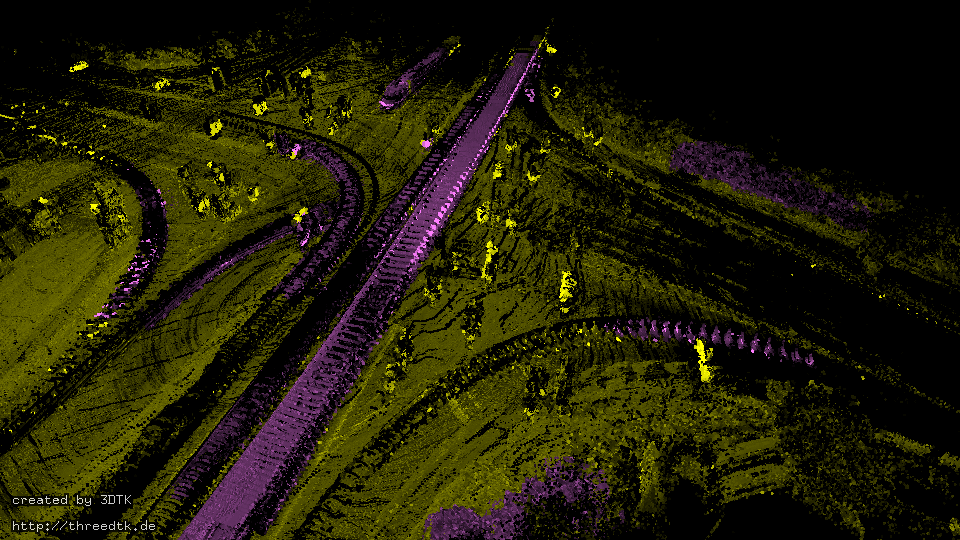
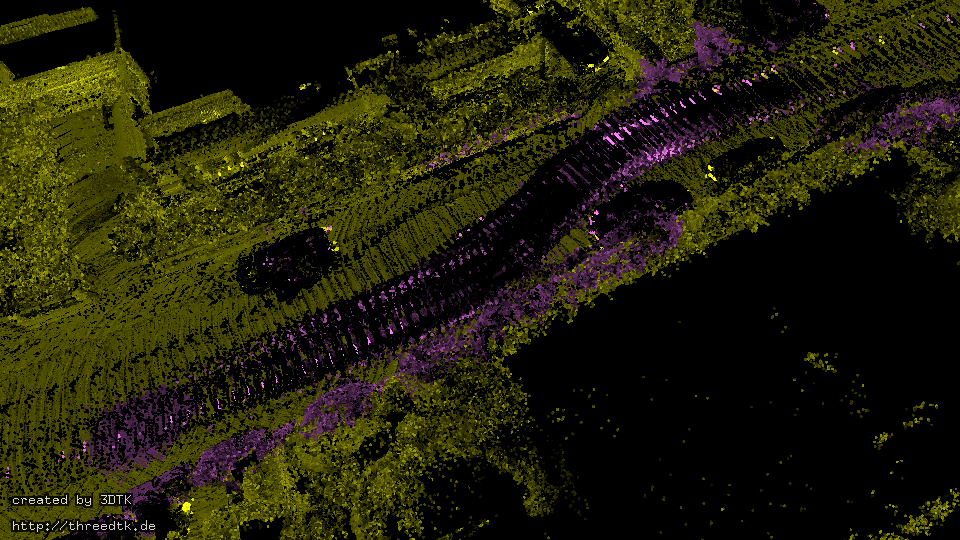
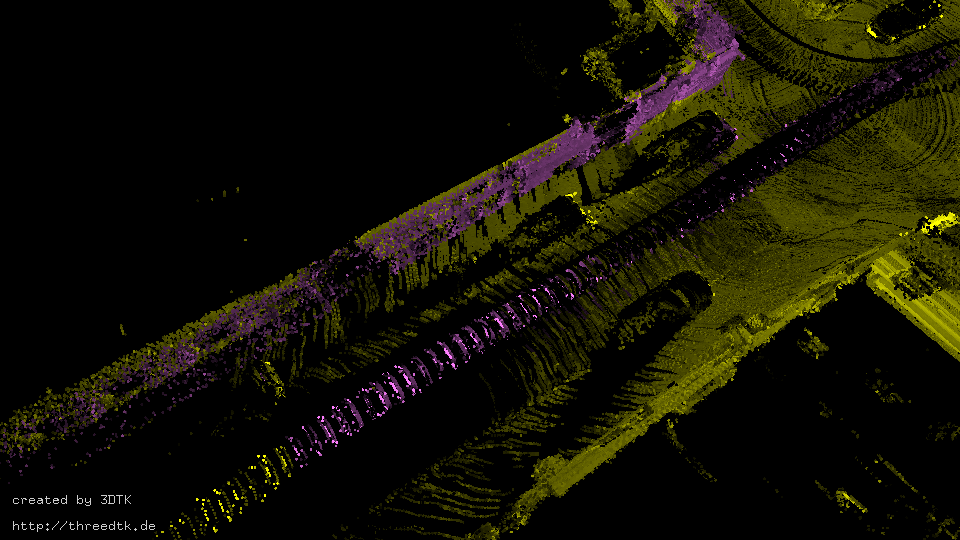
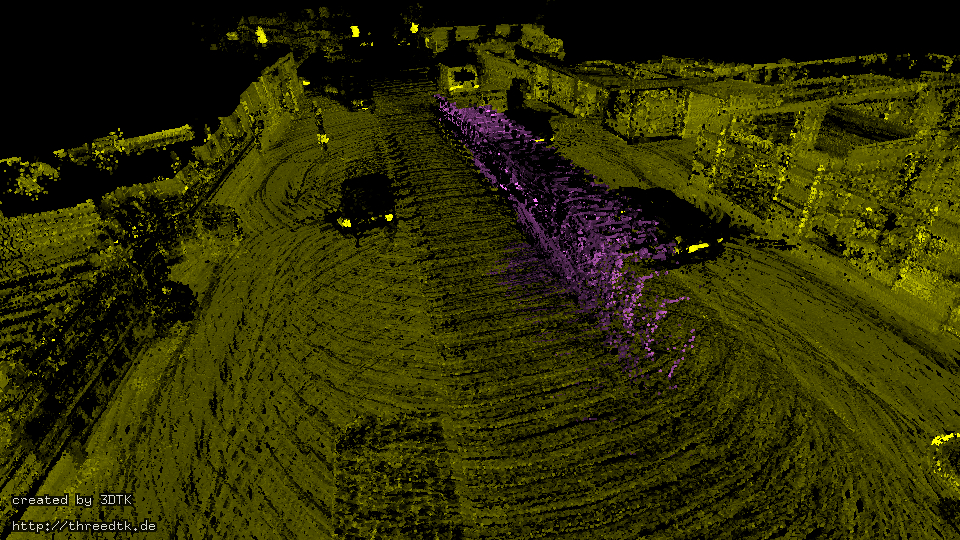
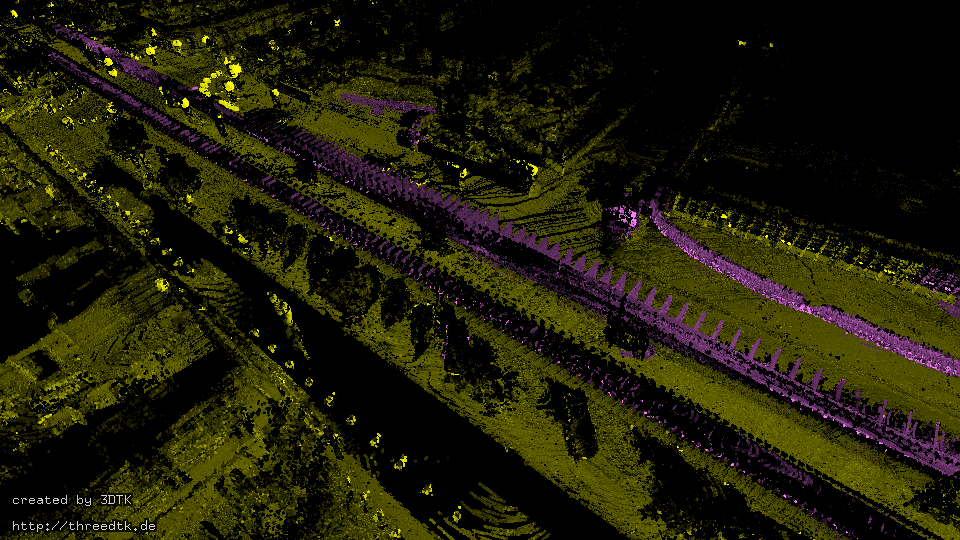
Even though it would be desirable for most post-processing purposes to obtain a point cloud without moving objects in it, it is often impractical or downright impossible to free a scene from all non-static clutter. Outdoor environments contain pedestrians, bicycles, and motor vehicles which cannot easily be stopped from entering the sensor range and indoor environments like factory production lines cannot be evacuated due to production losses during the time of the scan. In this paper we present a solution to this problem that we call the »peopleremover«. Given a registered set of 3D point clouds we build a regular voxel occupancy grid and then use ray tracing to find differences in volumetric occupancy between the scans. Our approach works for scan slices from mobile mapping as well as for the more general scenario of terrestrial scan data. The result is a clean point cloud free of dynamic objects.
Full pdf: schauer-icarcv2020-changedetection.pdf
Either clone the git repository of this website and its contents:
git clone https://robotik.informatik.uni-wuerzburg.de/telematics/download/icarcv2020
Or without git, download the repository as a tarball: icarcv2020.tar.gz
The repository contains a script run.sh and a README.md with further instructions of how to run the script. The code was tested on Debian Buster but should work on other systems as well.