Next: Acknowledgment
Up: 6D SLAM with an
Previous: Results and Conclusions
- 1
-
P. Allen, I. Stamos, A. Gueorguiev, E. Gold, and P. Blaer.
AVENUE: Automated Site Modeling in Urban Environments.
In Proc. IEEE 3DIM, Canada, 2001.
- 2
-
T. Bailey.
Mobile Robot Localisation and Mapping in Extensive Outdoor
Environments.
PhD thesis, University of Sydney, Australia, 2002.
- 3
-
J.J. Belwood and R.J. Waugh.
Bats and mines: Abandoned does not always mean empty.
Bats, 9(3), 1991.
- 4
-
R. Benjemaa and F. Schmitt.
Fast Global Registration of 3D Sampled Surfaces Using a
Multi-Z-Buffer Technique.
In Proc. IEEE 3DIM, Canada, 1997.
- 5
-
P. Besl and N. McKay.
A method for Registration of 3-D Shapes.
IEEE Transactions on PAMI, 14(2):239 - 256, February 1992.
- 6
-
P. Boulanger, O. Jokinen, and A. Beraldin.
Intrinsic Filtering of Range Images Using a Physically
Based Noise Model.
In Proc. 15th Int. Conf. on Vision Interface, Canada, 2002.
- 7
-
Y. Chen and G. Medoni.
Object Modelling by Registration of Multiple Range
Images.
In Proc. IEEE ICRA, USA, April 1991.
- 8
-
P. Corke, J. Cunningham, D. Dekker, , and H. Durrant-Whyte.
Autonomous underground vehicles.
In Proc. of the CMTE Mining Technology Conference, pages
16-22, Australia, September 1996.
- 9
-
D. Eggert, A. Fitzgibbon, and R. Fisher.
Simultaneous Registration of Multiple Range Views
Satisfying Global Consistency Constraints for Use In Reverse
Engineering.
Computer Vision and Image Understanding, 69:253 - 272,
March 1998.
- 10
-
D. Ferguson, A. Morris, D. Hähnel, C. Baker, Z. Omohundro, C. Reverte,
S. Thayer, W. Whittaker, W. Whittaker, W. Burgard, and S. Thrun.
An autonomous robotic system for mapping abandoned mines.
In S. Thrun, L. Saul, and B. Schölkopf, editors, Proc. of
NIPS. MIT Press, 2003.
- 11
-
J. Folkesson and H. Christensen.
Outdoor Exploration and SLAM using a Compressed Filter.
In Proc. of the IEEE ICRA, Taiwan, 2003.
- 12
-
N. Gelfand, S. Rusinkiewicz, and M. Levoy.
Geometrically Stable Sampling for the ICP Algorithm.
In Proc. IEEE 3DIM, Canada, 2003.
- 13
-
M. Greenspan and M. Yurick.
Approximate K-D Tree Search for Efficient ICP.
In Proc. IEEE 3DIM, Canada, 2003.
- 14
-
M. Hebert, M. Deans, D. Huber, B. Nabbe, and N. Vandapel.
Progress in 3-D Mapping and Localization.
In Proc. SIRS, France, 2001.
- 15
-
B. Horn.
Closed-form solution of absolute orientation using unit quaternions.
Journal of the Optical Society of America A, 4(4):629 - 642,
April 1987.
- 16
-
A. Morris, D. Kurth, W. Whittaker, and S. Thayer.
Case studies of a borehole deployable robot for limestone mine
profiling and mapping.
In Proc. FSR, Japan, 2003.
- 17
-
A. Nüchter, H. Surmann, K. Lingemann, and J. Hertzberg.
Consistent 3D Model Construction with Autonomous Mobile
Robots.
In Proc. 26th German Conference on AI KI 2003, Germany, 2003.
- 18
-
E. Pauley, T. Shumaker, and B. Cole.
Preliminary report of investigation: Underground bituminous coal
mine, non-injury mine inundation accident (entrapment), July 24, 2002,
Quecreek, Pennsylvania, 2002.
Black Wolf Coal Company, Inc. for the PA Bureau of Deep Mine Safety.
- 19
-
K. Pulli.
Multiview Registration for Large Data Sets.
In 3DIM, 1999.
- 20
-
S. Rusinkiewicz and M. Levoy.
Efficient variants of the ICP algorithm.
In Proc. IEEE 3DIM, pages 145 - 152, Canada, 2001.
- 21
-
D. Simon, M. Hebert, and T. Kanade.
Real-time 3-D pose estimation using a high-speed range sensor.
In Proc. IEEE ICRA, USA, 1994.
- 22
-
H. Surmann, A. Nüchter, and J. Hertzberg.
An autonomous mobile robot with a 3D laser range finder for 3D
exploration and digitalization of indoor environments.
Robotics and Autonomous Systems, 12 2003.
- 23
-
S. Thrun, D. Fox, and W. Burgard.
A real-time algorithm for mobile robot mapping with application to
multi robot and 3D mapping.
In Proc. of the IEEE ICRA, USA, 2000.
- 24
-
S. Thrun, D. Hähnel, D. Ferguson, M. Montemerlo, R. Triebel, W. Burgard,
C. Baker, Z. Omohundro, S. Thayer, and W. Whittaker.
A system for volumetric robotic mapping of abandoned mines.
In Proc. of the IEEE ICRA, 2003.
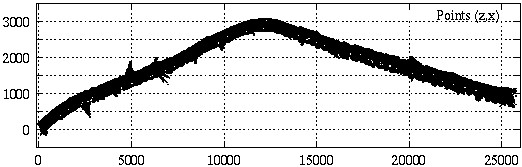
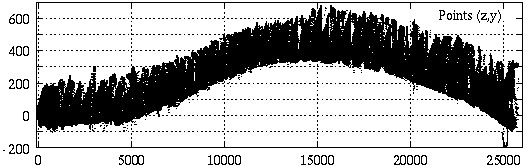
Figure 6:
Complete 3D map of the mine. Top:  -map (view from
top). Bottom:
-map (view from
top). Bottom:  -map (view from side).
-map (view from side).  is the depth axis
and and
is the depth axis
and and  the elevation. units: cm.
the elevation. units: cm.
|
root
2004-03-04