


Next: The Autonomous Mobile Robot
Up: Introduction
Previous: Related Work
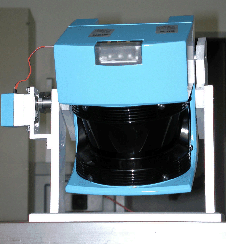
The AIS 3D laser range finder (23) is built on the basis of
a 2D range finder by extension with a mount and a servomotor. The
2D laser range finder is attached to the mount for being
rotated. The rotation axis is horizontal. A standard servo is
connected on the left side (figure 1) and is
controlled by the computer running RT-Linux, a real-time
operating system which runs LINUX as a task with lowest priority
(23). The 3D laser scanner operates up to 5h
(Scanner: 17 W, 20 NiMH cells with a capacity of 4500 mAh, Servo: 0.85 W,
4.5 V with batteries of 4500 mAh).
Figure 1:
The AIS 3D laser range finder.
 |
The area of
 (h)
(h) (v)
is scanned with different horizontal (181, 361, 721) and vertical
(128, 256) resolutions. A plane with 181 data points is scanned
in 13 ms by the 2D laser range finder (rotating mirror
device). Planes with more data points, e.g., 361, 721, duplicate
or quadruplicate this time. Thus a scan with 181
(v)
is scanned with different horizontal (181, 361, 721) and vertical
(128, 256) resolutions. A plane with 181 data points is scanned
in 13 ms by the 2D laser range finder (rotating mirror
device). Planes with more data points, e.g., 361, 721, duplicate
or quadruplicate this time. Thus a scan with 181  256
data points needs 3.4 seconds. In addition to the distance
measurement the AIS 3D laser range finder is capable of
quantifying the amount of light returning to the scanner.
256
data points needs 3.4 seconds. In addition to the distance
measurement the AIS 3D laser range finder is capable of
quantifying the amount of light returning to the scanner.
Next: The Autonomous Mobile Robot
Up: Introduction
Previous: Related Work
root
2003-08-06