
|
|
Institute of Computer Science — Knowledge-Based Systems Research Group |
Large-Scale 3D Mapping with Explicit Loop Closing |
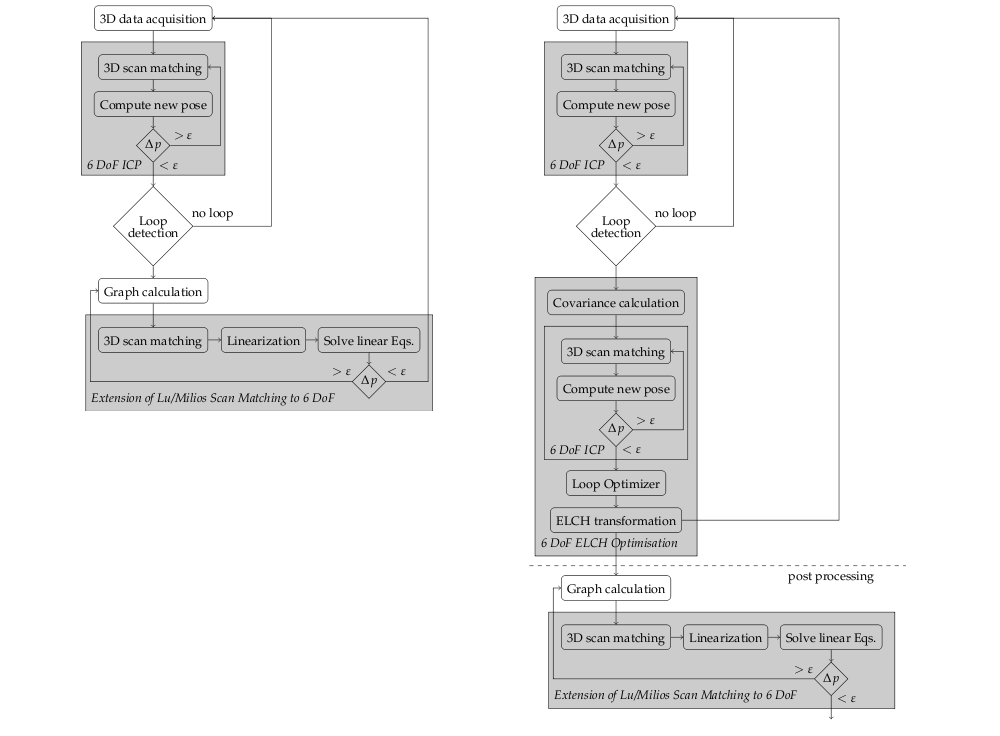
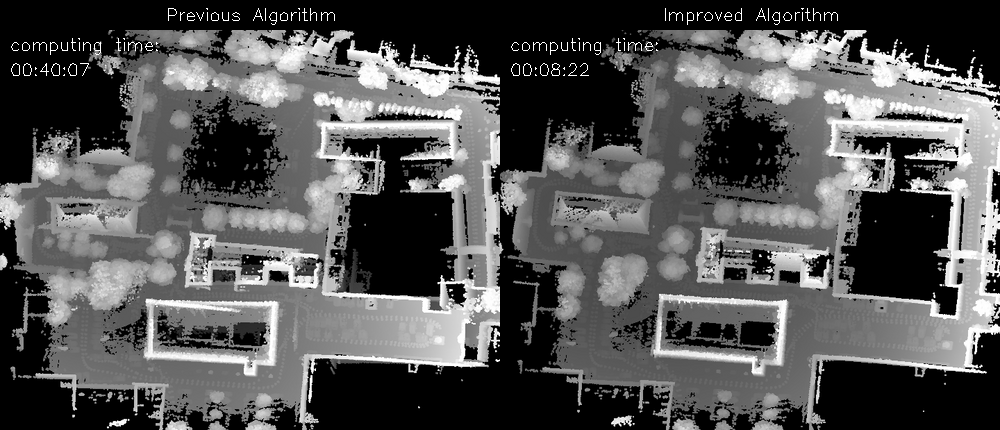
Simultaneous Localization and Mapping (SLAM) is the problem of building a map of an unknown environment by a mobile robot while at the same time navigating the environment, using the unfinished map. For SLAM, two tasks have to be solved: First reliable feature extraction and data association, second the optimal estimation of poses and features. These two parts are often referred to as SLAM frontend and backend. Algorithms that solve SLAM by using laser scans commonly rely on matching closest points in the frontend part. Then the SLAM front- and backend have to be iterated to ensure that the map converges. This paper presents a novel approach for solving SLAM using 3D laser range scans. We aim at avoiding the iteration between the SLAM front- and backend and propose a novel explicit loop closing heuristic (ELCH). It dissociates the last scan of a sequence of acquired scans, reassociates it to the map, built so far by scan registration, and distributes the difference in the pose error over the SLAM graph. We describe ELCH in the context of SLAM with 3D scans considering 6 DoF. The performance is evaluated using ground truth data of an urban environment.
Jochen Sprickerhof, Andreas Nüchter, Kai Lingemann, Joachim Hertzberg. An Explicit Loop Closing Technique for 6D SLAM, In Proceedings of the 4th European Conference on Mobile Robots (ECMR '09), Mlini/Dubrovnic, Croatia, September 2009 (accepted). [Get Paper (PDF)]
Oliver Wulf, Andreas Nüchter, Joachim Hertzberg, and Bernardo Wagner. Benchmarking Urban Six-Degree-of-Freedom Simultaneous Localization and Mapping. Journal of Field Robotics (JFR), Wiley & Son, ISSN 1556-4959, Vol. 25, Issue 3, pages 148 - 163, March, 2008, [Get Paper] [Get Videos].
Dorit Borrmann, Jan Elseberg, Kai Lingemann, Andreas Nüchter and Joachim Hertzberg. Globally consistent 3D mapping with scan matching. Journal of Robotics and Autonomous Systems, Vol. 56, Issue 2, pages 130 - 142, February 2008, [ScienceDirect Link] [Get Paper] [Get Videos].
Dorit Borrmann and Jan Elseberg, Global konsistente 3D Kartierung am Beispiel des Botanischen Gartens in Osnabrück [PDF], B.Sc. Mathematics / Computer Science, University of Osnabrück, submitted October 2006. [Get Videos]