Inspecting communal sewer systems is a potential application for mobile robots [3,14]. Two basic problems of such inspection robots are self localization and the reconstruction of sewerage pipe system. These two problems are addressed in this section. Similar to matching sewerage pipes is the problem of mapping cylinders in 3D data, which is well known in the reconstruction of industrial environments with pipes and tubes [5]. State of the art is semi-automatic reconstruction [9].
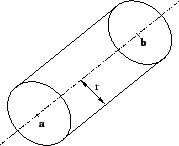
For matching of tubes into scanned pipes, the closest point on
the pipe surface is calculated as follows: Given a scan point
![]() and a pipe, described by two points
and a pipe, described by two points ![]() and
and ![]() (
(
![]() ) and the radius
) and the radius ![]() (figure
7), the closest point
(figure
7), the closest point ![]() to
to ![]() on the pipe
surface is
on the pipe
surface is
| (2) | |||
| (3) | |||
| (4) | |||
| (5) | |||
| (6) | |||
 |
(7) | ||
| (8) | |||
| (9) |
The following steps match pipes with the pipe model:
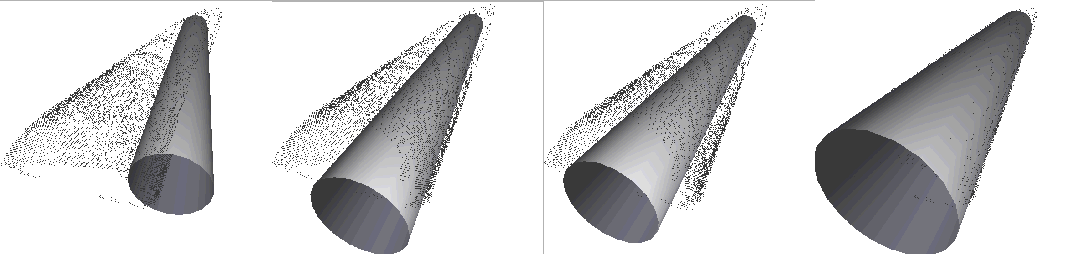 |
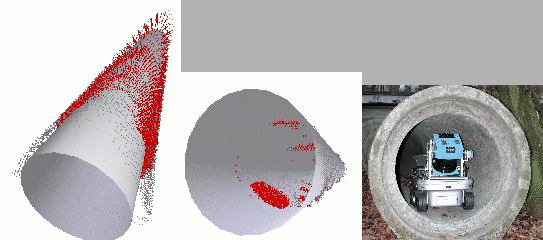 |
With the proposed matching, a pipe is reconstructed. Due to the exact matching of the tube and the high precision of the scanner, deviations and abnormalities like pipe deformations are also detected. Furthermore obstacles, e.g., a brick as given in the middle picture of figure 9 are found. The self localization of the robot is improved, because the transformations calculated by the matching process is applied to the robot pose.