![[*]](footnote.png)
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
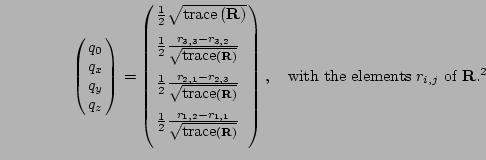
 then,
then,
![\begin{displaymath}\left(
\begin{array}{l}
\frac{1}{2} \frac{r_{2,3} - r_{3,2}}{...
... - r_{1,1} +
r_{2,2} - r_{3,3}}} [2.5ex]
\end{array}\right),\end{displaymath}](img90.png) |
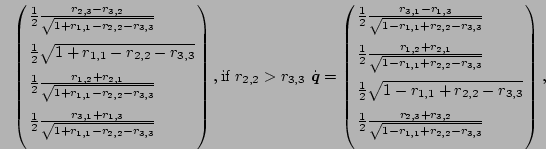
otherwise the quaternion
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
then,
|
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . .