The experiments for this paper have been made with Kurt3D in the University of Osnabrück's Botanical Garden, with the Kurt3D robot being steered manually (joystick control) between scan points. 3D scans have been automatically acquired and matched, and drivable surface points extracted. Fig. 5 presents the mapping result as well as an impression of the maximal difference in elevation.
|
The online extraction of drivable surface has yielded sufficiently much such area so that a subsequent planning process (recall item 5 in our sequence of SPLAM subtasks above!) would have enough opportunities for working.
We have encountered some problems. As mentioned for Fig. 4, right, we need to make sure that scan distances are sufficiently close for mapping a continuous path to a continuous surface. Very ragged surface like cobblestone with large and/or sharp gaps between the tiles or stones would not be classified drivable by our method; in fact, one may ask whether it objectively is drivable for our Kurt3D robot, or should rather be avoided. Finally, the elevation values of our mapped points were quite inaccurate at the end of the path, due to a medium error quite early in the drive. This angle error has then accumulated over the subsequent scans, which were locally correctly registered. Affordable inclinometers do not seem to solve the problem, as their expected measurement error seems to be in the same order of magnitude as the registration pitch angle error (some degrees). We expect this type of problem to be solved in a later stage of the overall SPLAM process by loop closing. Note that this error has not affected the locally correct classification of drivable surface areas.
Future work will continue to fill up the list of SPLAM subtasks named earlier. To help localization and provide waypoints in outdoor environments, we will integrate GPS information. To make drivable surface detection more flexible and more robust, we will add camera-based path detection.
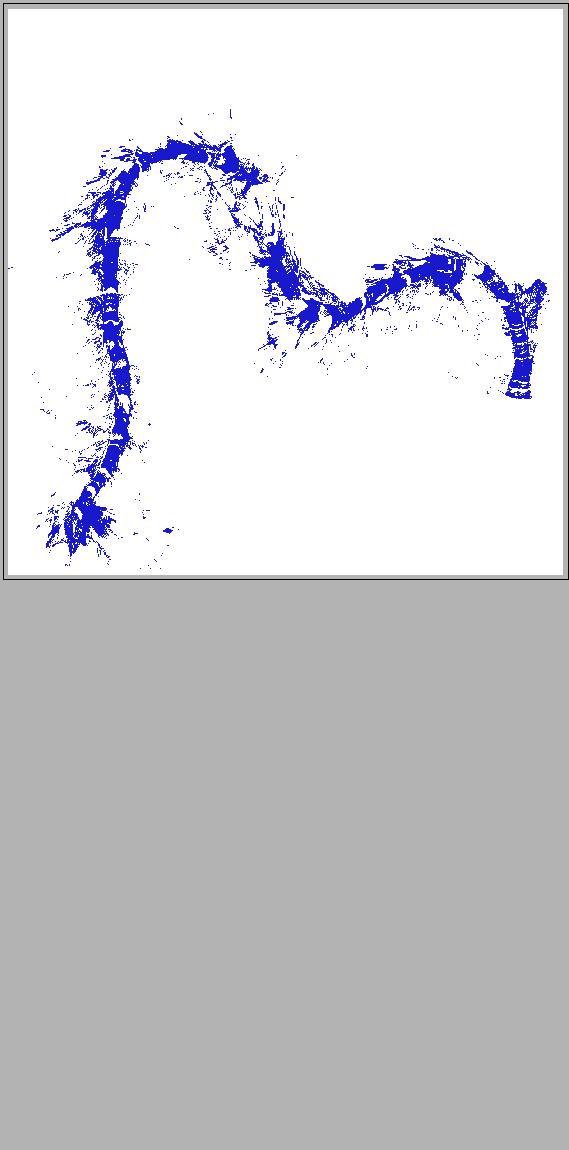 m, blue boxes
correspond to scan poses. Most scan points in the top view
correspond to trees and bushes. The overall map has been
generated of 55 scans of ca. 85,000 points each; the path
length was about 150m. Bottom left: Subset of the
overall map, consisting of drivable surface only. The
discontinuity in the middle part is due to very ragged ground.
m, blue boxes
correspond to scan poses. Most scan points in the top view
correspond to trees and bushes. The overall map has been
generated of 55 scans of ca. 85,000 points each; the path
length was about 150m. Bottom left: Subset of the
overall map, consisting of drivable surface only. The
discontinuity in the middle part is due to very ragged ground.
![\fbox{\includegraphics[width=\linewidth]{b13}}](img91.png)