The following method for registration of point sets is part of many publications, so only a short summary is given here. The complete algorithm was invented in 1991 and can be found, e.g., in [4,6,22]. The method is called Iterative Closest Points (ICP) algorithm.
Given two independently acquired sets of 3D points, ![]() (model set,
(model set,
![]() ) and
) and ![]() (data set,
(data set, ![]() ) which correspond to
a single shape, we want to find the transformation consisting of
a rotation
) which correspond to
a single shape, we want to find the transformation consisting of
a rotation ![]() and a translation
and a translation ![]() which minimizes the
following cost function:
which minimizes the
following cost function:
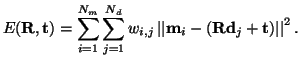
The ICP algorithm calculates iteratively the point
correspondence. In each iteration step, the algorithm selects the
closest points as correspondences and calculates the
transformation (![]() ) for minimizing equation
(1). It is shown that the iteration terminates in a
minimum [4]. The assumption is that in the last
iteration step the point correspondences are correct.
) for minimizing equation
(1). It is shown that the iteration terminates in a
minimum [4]. The assumption is that in the last
iteration step the point correspondences are correct.
In each iteration, the transformation is calculated by the
quaternion based method of Horn [12]. A unit
quaternion is a 4 vector
![]() , where
, where
![]() . It describes a
rotation axis and an angle to rotate around that axis. A
. It describes a
rotation axis and an angle to rotate around that axis. A
![]() rotation matrix
rotation matrix ![]() is calculated from the unit
quaternion according the the following scheme:
is calculated from the unit
quaternion according the the following scheme:
To determine the transformation, the mean values (centroid
vectors) ![]() and
and ![]() are subtracted from all points in
are subtracted from all points in
![]() and
and ![]() , respectively, resulting in the sets
, respectively, resulting in the sets ![]() and
and ![]() .
The rotation expressed as quaternion that minimizes equation
(1) is the largest eigenvalue of the cross-covariance
matrix
.
The rotation expressed as quaternion that minimizes equation
(1) is the largest eigenvalue of the cross-covariance
matrix
The time complexity of the algorithm mainly depends on
determination of the closest points (brute force search O(![]() )
for 3D scans of
)
for 3D scans of ![]() points). Several enhancements have been
proposed [4,17]. We have implemented
points). Several enhancements have been
proposed [4,17]. We have implemented
![]() d-trees as proposed by Simon et al., combined with the
above-described reduced points. Table 1
summarizes the results of different experiments on a
Pentium-III-800. The starting point for optimization is given by
the robot odometry.
d-trees as proposed by Simon et al., combined with the
above-described reduced points. Table 1
summarizes the results of different experiments on a
Pentium-III-800. The starting point for optimization is given by
the robot odometry.
| points used | time | # iter. |
| all points & brute force | 3 hours 47 min | 27 |
| reduced points & brute force | 3 min 6 sec | 25 |
| all points & |
6 sec | 27 |
| reduced points & |
|
25 |
 |