The scene interpretation uses the features, i.e., planes previously computed. The background for interpretation comprises generic architectural knowledge. A model of an indoor scene is implemented as a semantic net based on the idea of Grau et al. [7] that is also used by Cantzler et al. [5].
|
=8.0cm
|
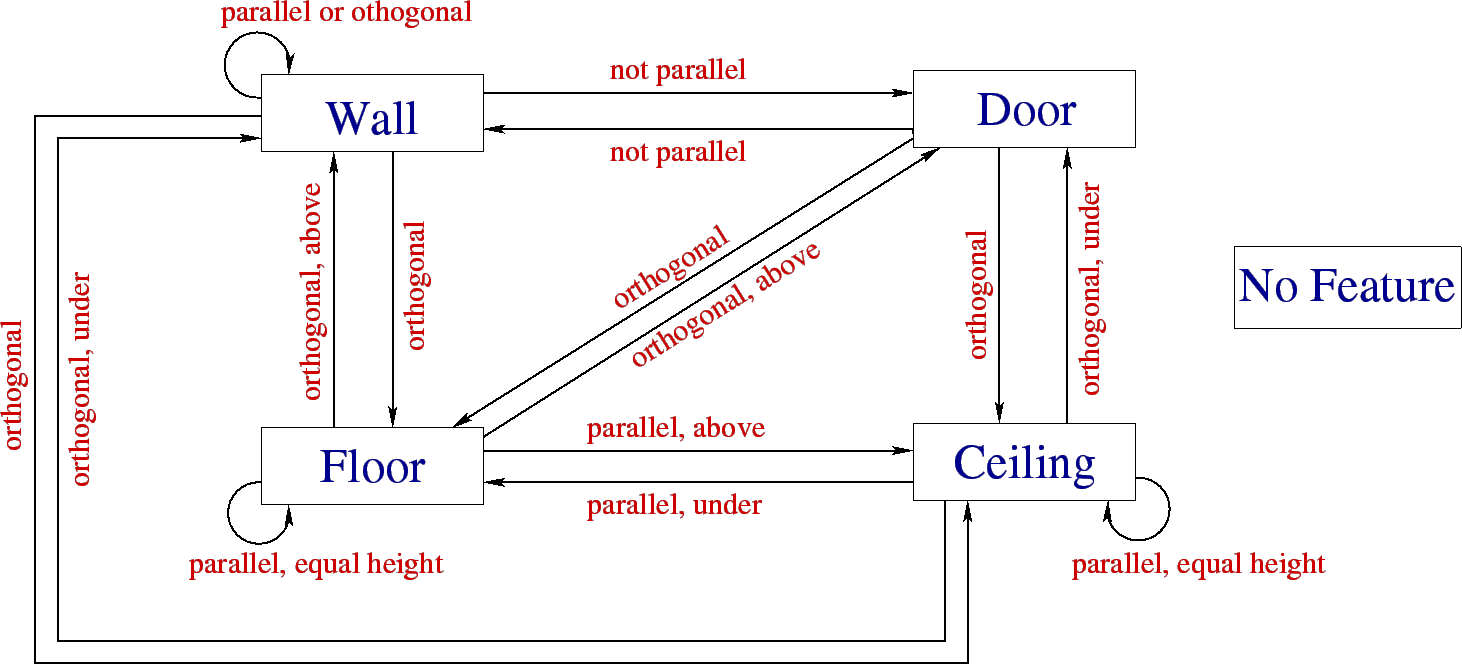
Nodes of a semantic net represent entities of the world. The
relationship between the entities are encoded using different
connections. Possible labels of the nodes are
![]() . The
relationships between the features are
. The
relationships between the features are
![]() . The labels above and
under are relative to their plane and hence not
commutative. Figure 2 left shows the entities
and their relations. The entity door represents an
open door. The semantic net can easily be
extended. Further entities have to be accompanied by a more
sophisticated feature detection. This paper concentrates on plane
detection so that the semantic net is a subset of all indoor
environments.
. The labels above and
under are relative to their plane and hence not
commutative. Figure 2 left shows the entities
and their relations. The entity door represents an
open door. The semantic net can easily be
extended. Further entities have to be accompanied by a more
sophisticated feature detection. This paper concentrates on plane
detection so that the semantic net is a subset of all indoor
environments.
Prolog is used to implement and externalize the semantic net. The
net is encoded by definite Horn clauses [18]. The
nodes of the net are arguments and the arcs define relations on
the nodes. Figure 2 right shows a part of the
semantic net as a Prolog program. All facts for the relation
parallel are shown. For encoding the label
nofeature, a condition is used. This prevents Prolog's
unification algorithm from assigning planes with the label
nofeature. In addition to the representation of the
semantic net, a clause of the following form is compiled from the
analysis of the planes. The planes are represented by variables
P0, P1, etc.:
labeling(P0,P1,P2,P3,P4) :-
parallel(P0,P1),under(P0,P1),
orthogonal(P0,P2),under(P0,P2),
orthogonal(P0,P3),under(P0,P3),
parallel(P0,P4),above(P0,P4),
![]()
Prolog's unification algorithm is used to assign a consistent
labeling to the planes:
consistent_labeling(P0,P1,P2,P3,P4) :-
labeling(P0,P1,P2,P3,P4).
The label nofeature is considered, iff the unification
fails. In this case, an additional Horn clause is used to
generate a consistent labeling with explicit unifying of one
variable with nofeature. All combinations are computed
to unify the variable:
consistent_labeling(P0,P1,P2,P3,P4) :-
comb([P0,P1,P2,P3,P4],[nofeature]),
labeling(P0,P1,P2,P3,P4).
The process is continued with assigning two variables the label
to nofeature, and so on until a Prolog's unification succeeds:
consistent_labeling(P0,P1,P2,P3,P4) :-
comb([P0,P1,P2,P3,P4],[nofeature,nofeature]),
labeling(P0,P1,P2,P3,P4).
![]()
The order of the rules above is important, as in all Prolog
programs. Prolog searches for clauses from top to bottom.
The following three clauses are used to compute
all combinations:
comb(_,[]).
comb([X|T],[X|Comb]) :- comb(T,Comb).
comb([_|T],[X|Comb]) :- comb(T,[X|Comb]).
Finally the following query is submitted:
consistent_labeling(P0,P1,P2,P3,P4).
and the automatic generated Prolog program starts and
computes the solution. Table 1 shows
the computation time (Pentium IV-2400, SWI-Prolog [15]) of
the Prolog program and a previous complete depth first search
implementation [12].