Another suitable optimization algorithm for eq. (3) is
the downhill simplex method as used by Cantzler et
al. [4]. A nondegenerate simplex is a
geometrical figure consisting of ![]() vertices in
vertices in ![]() dimensions, whereas the
dimensions, whereas the ![]() vertices span a
vertices span a ![]() -dimensional
vector space. Given an initial starting point
-dimensional
vector space. Given an initial starting point ![]() , the
starting simplex is computed through
, the
starting simplex is computed through
| (36) |
The downhill simplex method consists of a series of steps, i.e., reflections and contractions [14]. In a reflection step the algorithm moves the point of the simplex where the function is largest through the opposite face of the simplex to some lower point. If the algorithm reaches a ``valley floor'', the method contracts the simplex, i.e., the volume of the simplex decreases by moving one or several points, and moves along the valley [14].
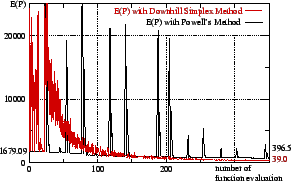
Figure 3 shows the minimization of eq. (3) with
the downhill simplex method in comparison with Powell's
method. The downhill simplex method performs worse during the
first steps, but reaches a better minimum than Powell's method. The
peaks in ![]() produced by Powell's method are the result of
search directions
produced by Powell's method are the result of
search directions ![]() cross a ``valley'' in combination with
large steps in Brent's line minimization algorithm.
cross a ``valley'' in combination with
large steps in Brent's line minimization algorithm.
 |